Custom Cards > Vacuum Map Card
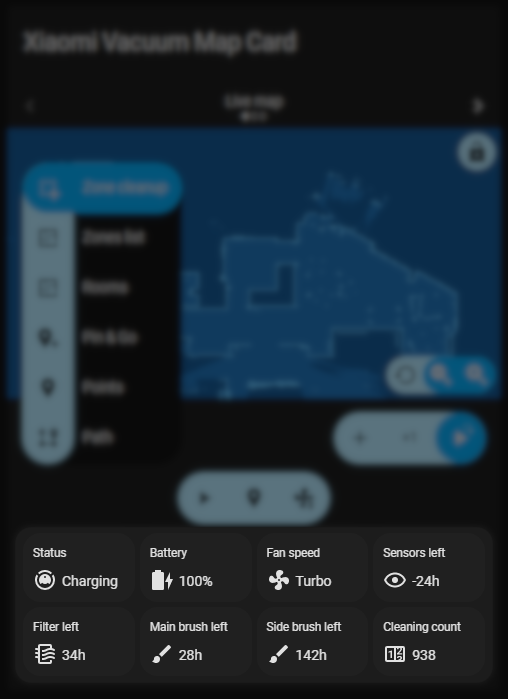
This card provides a user-friendly way to fully control Xiaomi (Roborock/Viomi/Dreame/Roidmi) and Neato (+ possibly other) vacuums.







Lovelace Vacuum Map card
This card provides a user-friendly way to fully control map-based vacuums in Home Assistant. Supported brands include Xiaomi (Roborock/Viomi/Dreame/Roidmi/Valetudo/Valetudo RE), Neato, Wyze, Roomba, Ecovacs (and probably more).
https://user-images.githubusercontent.com/6118709/140251738-7fb06e81-34b0-4bf8-b7b1-2221d0062331.mp4
Table of contents
- Features
- Installation
- Configuration
- FAQ
- Migrating from v1.x.x
- Translations
- Special thanks
- Support
Features
Features include:
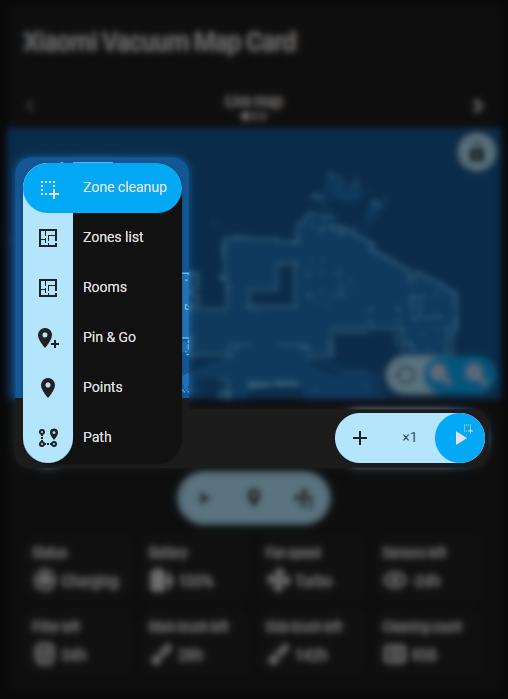
- Map-based controls:
- Zoned cleaning (manual and saved)
- Going to target (manual and saved)
- Room cleaning
- Following path
- Custom services
- Icon controls:
- Conditional visibility
- Customizable service calls
- Value tiles:
- Customizable content
- Conditional visibility
- Customizable service calls
- General:
- Multiple vacuums support
- Multiple maps (camera/image) support
- Fully customizable styling
Installation
HACS
- Open HACS
- Go to "Frontend" section
- Click button with "+" icon
- Search for "Xiaomi Vacuum Map"
- Install repository in HACS
- Make sure you have added this card to Lovelace resources
url: /hacsfiles/lovelace-xiaomi-vacuum-map-card/xiaomi-vacuum-map-card.js type: module - Refresh your browser
Manual
- Download
xiaomi-vacuum-map-card.jsfile from the latest release - Save downloaded file somewhere in
<ha config>/www/directory, e.g./config/www/custom_lovelace/xiaomi-vacuum-map-card.js - Add saved file to Lovelace resources
url: /local/custom_lovelace/xiaomi-vacuum-map-card.js type: module - Restart HA if you had to create
wwwdirectory - Refresh your browser
Configuration
This card contains UI configuration editor, but it is limited to only basic set of features. Its full potential can be achieved by manual yaml adjustments.
:warning::warning::warning:
You can use this configuration as an example: demo config (configuration used in full_demo.mp4).
:warning::warning::warning:
Main options
| Key | Type | Required | Default | Description |
|---|---|---|---|---|
title |
string | no | empty | Card's title |
language |
string | no | autodetected | Overrides autodetected language (supported languages) |
action_handler_id |
string | no | - | Enables action handling |
additional_presets |
list | no | empty | A list of additional presets (e.g. with different map/vacuum) |
| All values from preset options section | ||||
Preset options
| Key | Type | Required | Default | Description |
|---|---|---|---|---|
preset_name |
string | yes1 | - | Name of the preset |
entity |
string | yes | - | Vacuum entity |
map_source |
string | yes | - | Preset's map source |
calibration_source |
object | yes2 | - | Preset's calibration source |
vacuum_platform |
string | no | default |
Preset's vacuum platform |
map_locked |
boolean | no | false |
Default state of pan/zoom |
two_finger_pan |
string | no | false |
Enables two finger map panning |
icons |
list | no | autogenerated | Preset's icons |
append_icons |
boolean | no | false |
Enables appending configured icons to autogenerated ones instead of replacing them |
tiles |
list | no | autogenerated | Preset's tiles |
append_tiles |
boolean | no | false |
Enables appending configured tiles to autogenerated ones instead of replacing them |
map_modes |
list | no | autogenerated | Preset's map modes |
activate |
object | no | - | Service call that should be executed after clicking preset name |
activate_on_switch |
boolean | no | false |
Enables executing activate service call after switching map preset |
conditions |
list | no | - | List of conditions that need to be (all of them) met for preset to be shown |
clean_selection_on_start |
boolean | no | true |
Allows to disable cleaning selection on cleanup start |
internal_variables |
object | no | - | Allows to specify default values for internal variables |
1 If multiple presets are configured
2 Not mandatory when used with a platform that support a default calibration
Map source options
| Key | Type | Required | Default | Description |
|---|---|---|---|---|
camera |
string | no1 | - | Entity id of map camera |
image |
string | no1 | - | URL of map image |
crop |
object | no | no cropping | Images cropping options |
1 Exactly one of camera or image must be provided
Cropping options
| Key | Type | Required | Default | Description |
|---|---|---|---|---|
top |
number | no | 0 | Image cropping value from the top (in pixels) |
bottom |
number | no | 0 | Image cropping value from the bottom (in pixels) |
left |
number | no | 0 | Image cropping value from the left (in pixels) |
right |
number | no | 0 | Image cropping value from the right (in pixels) |
Calibration source options
| Key | Type | Required | Default | Description |
|---|---|---|---|---|
camera |
boolean | no1 | - | Enables retrieving calibration from camera defined in map_source (Xiaomi Cloud Map Extractor) |
entity |
string | no1 | - | Entity with calibration returned as a state |
attribute |
string | no | - | Enables usage of a configured attribute instead of state of given entity |
calibration_points |
list | no1 | - | List of 3 or 4 calibration points |
identity |
boolean | no1 | - | Enables using image coordinates on map (e.g. when map is used just for rooms) |
platform |
string | no1 | - | Enables using a default calibration from a chosen platform (provided that it supports it) |
1 Exactly one of camera, entity, calibration_points, identity or platform must be provided
Calibration points options
Each of calibration points must have a following structure:
vacuum: # coordinates of a point in a vacuum coordinate system
x: 25500
y: 25500
map: # coordinates of a point in a map coordinate system (can be read using e.g. Paint or Gimp)
x: 466
y: 1889
Supported vacuum platforms
Following vacuum platforms are supported out of the box at this moment:
Xiaomi MiioRoborockhumbertogontijo/homeassistant-roborockTasshack/dreame-vacuumrand256/ValetudoREHypfer/Valetudomarotoweb/viomi SEtykarol/ViomiVacuumV8KrzysztofHajdamowicz/miio2send_commandal-one/Xiaomi MIoT(additional manual configuration required)NeatoRoombaDeebotUniverse/Deebot-4-Home-Assistantromedtino/simple-wyze-vacBenjaminPaap/home-assistant-myneato
Create a request for a new built-in platform
Icon list entry options
![]()
| Key | Type | Required | Default | Description |
|---|---|---|---|---|
icon |
string | yes | - | An icon to be displayed (mdi) |
icon_id |
string | no | - | Icon ID that can be used to override the configuration |
tap_action |
action | no | more-info | Action that will be triggered when an icon is tapped. Warning: use service_data instead of data |
hold_action |
action | no | - | Action that will be triggered when an icon is held and released. Warning: use service_data instead of data |
double_tap_action |
action | no | - | Action that will be triggered when an icon is double-tapped. Warning: use service_data instead of data |
conditions |
list | no | - | List of conditions that need to be (all of them) met for an icon to be shown |
tooltip |
string | no | - | Tooltip to be displayed on hoover |
order |
number | no | - | Used to sort the icons |
replace_config |
boolean | no | false |
Marks that this icon should override the config of an already existing icon with the same icon_id |
menu_id |
string | no | - | Adds this icon to the menu with given ID |
label |
string | no | - | Label that should be displayed in the menu |
variables |
object | no | - | Variables that should be passed to to service calls |
remove |
boolean | no | false |
Allows to remove specific pre-defined icon (when combined with icon_id and replace_config: true |
Menu icon additional options
| Key | Type | Required | Default | Description |
|---|---|---|---|---|
type |
string | yes | - | Has to be set to menu |
menu_id |
string | yes | - | A menu ID |
entity |
string | yes | - | Entity that should be used to generate the menu |
current_value_attribute |
string | no | - | Changes the source of the selected value to given attribute |
available_values_attribute |
string | yes | - | Configures an attribute that contains all available values for the menu |
icon_mapping |
object | no | - | A mapping of possible entity value -> icon that should be used for the value |
value_translation_keys |
object | no | - | A mapping of possible entity value -> label that should be used for the value |
tap_action |
object | no | - | Action that should enable a specific value |
Examples:
- Menu based on the
selectentitytype: "menu", menu_id: "water_box_mode", icon_id: "water_box_mode", entity: "select.water_box_mode" available_values_attribute: "options" icon: "mdi:water", icon_mapping: off: "mdi:water-remove" mild: "mdi:water-minus" moderate: "mdi:water" intense: "mdi:water-plus" custom: "mdi:water-sync" tap_action: action: "call-service" service: "select.select_option" service_data: option: "[[value]]" entity_id: "[[entity_id]]"
Tile list entry options
| Key | Type | Required | Default | Description |
|---|---|---|---|---|
label |
string | no | - | Label of a tile |
entity |
string | no | - | Entity which should be shown on a tile |
internal_variable |
string | no | - | Internal variable which should be shown on a tile |
icon |
string | no | - | An icon to be displayed (mdi) |
icon_source |
string | no | - | Source of an icon, e.g: vacuum.xiaomi.attributes.battery_icon |
attribute |
string | no | - | Attribute that should be shown on a tile |
multiplier |
number | no | - | Multiplier that should be used to calculate value shown on a tile |
precision |
number | no | - | Precision that should be used to present value on a tile |
unit |
string | no | - | Unit to be used |
tap_action |
action | no | more-info | Action that will be triggered when a tile is tapped. Warning: use service_data instead of data |
hold_action |
action | no | - | Action that will be triggered when a tile is held and released. Warning: use service_data instead of data |
double_tap_action |
action | no | - | Action that will be triggered when a tile is double-tapped. Warning: use service_data instead of data |
conditions |
list | no | - | List of conditions that need to be (all of them) met for a tile to be shown |
tooltip |
string | no | - | Tooltip to be displayed on hoover |
translations |
map | no | - | Translations that should be applied to tile's value |
tile_id |
string | no | - | ID of an autogenerated tile that should be replaced with this one |
order |
number | no | - | Used to sort the tiles |
replace_config |
boolean | no | false |
Marks that this tile should override the config of an already existing tile with the same tile_id |
variables |
object | no | - | Variables that should be passed to to service calls |
remove |
boolean | no | false |
Allows to remove specific pre-defined tile (when combined with icon_id and replace_config: true |
Condition options
| Key | Type | Required | Default | Description |
|---|---|---|---|---|
entity |
string | no | - | Entity ID |
attribute |
string | no | - | Attribute to use instead of entity state |
internal_variable |
string | no | - | Name of internal variable to use instead of entity state |
value |
string | no1 | - | Entity state/attribute has to be equal to this value |
value_not |
string | no1 | - | Entity state/attribute has to be unequal to this value |
1 Exactly one of them has to be provided
Map modes options
| Key | Type | Required | Default | Description |
|---|---|---|---|---|
template |
string | no1 | - | Map mode template to be used (supported templates) |
name |
string | yes2 | - | Name of map mode |
icon |
string | yes2 | - | Icon of map mode (mdi) |
selection_type |
string | yes2 | - | Type of selection, one of supported ones |
service_call_schema |
object | yes2 | - | Service call schema that should be used in this mode |
run_immediately |
boolean | no | false |
Enables calling service immediately after choosing a selection |
coordinates_rounding |
boolean | no | true |
Enables coordinates rounding |
max_selections |
integer | no | 1 | Maximal number of selections |
repeats_type |
string | no | NONE |
Type of repeats inclusion, one of supported ones |
max_repeats |
integer | no | 1 | Maximal value of repeats |
variables |
object | no | - | Variables that should be passed to service_call_schema |
predefined_selections |
list | no3 | - |
You can override any value from built-in template by providing it in your configuration
1 Not required if all parameters with (2) are provided
2 Required if template is not provided
3 Required if template is not provided and selection_type is one
of: PREDEFINED_RECTANGLE, PREDEFINED_POINT, ROOM
Supported templates
List of supported templates depends on selected vacuum_platform
Supported selection types
Following selection types are supported at this moment:
MANUAL_RECTANGLE: Free-drawn rectangular zones on the mapPREDEFINED_RECTANGLE: Rectangular zones that can be selected on the map frompredefined_selectionsMANUAL_POINT: Point selected by clicking in an arbitrary place on the mapPREDEFINED_POINT: Point selected on the map frompredefined_selectionsROOM: Identifier-based selection with free-drawn outlineMANUAL_PATH: Path selected by clicking on the map
Service call schema options
| Key | Type | Required | Default | Description |
|---|---|---|---|---|
service |
string | yes | - | Service that should be called in a given mode |
service_data |
object | no | - | Data that should be passed to service call |
target |
object | no | - | Target that should be passed to service call |
evaluate_data_as_template |
boolean | no | false |
Enables support for jinja templates in service calls |
It is possible to use several built-in placeholders in service_data section. They will be replaced by:
[[entity_id]]:entity_iddefined in preset's config[[selection]]: selection made on the map (zone, point or path)[[selection_size]]: number of selections made on the map[[selection_unwrapped]]: the same as[[selection]], but passed as string unwrapped from brackets[[repeats]]: selected number of repeats[[point_x]]: x coordinate of selected point (forMANUAL_POINTandPREDEFINED_POINTselection types)[[point_y]]: y coordinate of selected point (forMANUAL_POINTandPREDEFINED_POINTselection types)[[variables]]: a list of variables for all selections
It is possible to use any value from variables section (wrapped with double rectangular brackets):
variables:
test_variable: 123
service_call_schema:
service: fake.service
service_data:
var: "[[test_variable]]"
It is possible to use following modifiers in service_data section:
|[[jsonify]]: if value ends with this modifier it will be decoded as a JSON and attached to service call in unwrapped form|[[jsonify_jinja]]: behaves in the same way as|[[jsonify]], but is executed after jinja templating
Supported repeats types
Following repeats types are supported at this moment:
NONE: No repeatsINTERNAL: Repeats number included in coordinates array ([25500, 25000, 26500, 26500, 2])EXTERNAL: Repeats number used as a separate attribute inservice_call_schemaREPEAT: Repeats selection (repeats:2, selection:[5,6]=>[5,6,5,6])
Predefined selection options
Format of data depends on selected selection_type:
PREDEFINED_RECTANGLEKey Type Required Default Description zoneslist yes - List of lists containing zone's coordinates in [x,y,width,height]format (e.g.[[25500, 25000, 26500, 26500]])iconobject no - Icon definition labelobject no - Label definition variablesobject no - Variables that should be passed to service_call_schemadefault_stateselected/unselectedno unselectedDefault state of selection state_entityentity id no - Entity that should be used to store the state of selection See this page to check how to easily retrieve zone coordinates.
PREDEFINED_POINTKey Type Required Default Description positionlist yes - Point's coordinates in [x,y]format (e.g.[25500, 25000])iconobject no - Icon definition labelobject no - Label definition variablesobject no - Variables that should be passed to service_call_schemadefault_stateselected/unselectedno unselectedDefault state of selection state_entityentity id no - Entity that should be used to store the state of selection See this page to check how to easily retrieve point coordinates.
ROOM
| Key | Type | Required | Default | Description |
|---|---|---|---|---|
id |
string or number | yes | - | Room's identifier |
outline |
list | no | - | List of points forming an outline of a room (e.g. [[25500,25500],[26500,25500],[25500,26500]] |
icon |
object | no | - | Icon definition |
label |
object | no | - | Label definition |
variables |
object | no | - | Variables that should be passed to service_call_schema |
default_state |
selected/unselected |
no | unselected |
Default state of selection |
state_entity |
entity id | no | - | Entity that should be used to store the state of selection (e.g. switch.bathroom) |
See this page to check how to easily create outline.
Icon options
| Key | Type | Required | Default | Description |
|---|---|---|---|---|
name |
string | yes | - | An icon to be displayed (mdi) |
x |
number | yes | - | X coordinate of an icon (in vacuum's coordinate system) |
y |
number | yes | - | Y coordinate of an icon (in vacuum's coordinate system) |
Label options
| Key | Type | Required | Default | Description |
|---|---|---|---|---|
text |
string | yes | - | Text to be displayed |
x |
number | yes | - | X coordinate of a label (in vacuum's coordinate system) |
y |
number | yes | - | Y coordinate of a label (in vacuum's coordinate system) |
offset_x |
number | no | - | Offset that should be applied to label in X direction (in pixels) |
offset_y |
number | no | - | Offset that should be applied to label in Y direction (in pixels) |
Action handling
To enable handling actions you have to configure action_handler_id in Main options.
This card handles following actions:
Starts cleaning
tap_action: action: fire-dom-event xiaomi_vacuum_map_card: action_handler_id: xiaomi_vacuum_map_card_id_1 action: cleaning.startSet a value of internal variable
tap_action: action: fire-dom-event xiaomi_vacuum_map_card: action_handler_id: xiaomi_vacuum_map_card_id_1 action: internal_variable.set data: variable: variable_1 value: "some value"Selects next map mode
tap_action: action: fire-dom-event xiaomi_vacuum_map_card: action_handler_id: xiaomi_vacuum_map_card_id_1 action: map_mode.nextSelects previous map mode
tap_action: action: fire-dom-event xiaomi_vacuum_map_card: action_handler_id: xiaomi_vacuum_map_card_id_1 action: map_mode.previousSelects a specific map mode
tap_action: action: fire-dom-event xiaomi_vacuum_map_card: action_handler_id: xiaomi_vacuum_map_card_id_1 action: map_mode.set data: index: 2Decrements a number of repeats
tap_action: action: fire-dom-event xiaomi_vacuum_map_card: action_handler_id: xiaomi_vacuum_map_card_id_1 action: repeats.decrementIncrements a number of repeats
tap_action: action: fire-dom-event xiaomi_vacuum_map_card: action_handler_id: xiaomi_vacuum_map_card_id_1 action: repeats.incrementSet a number of repeats
tap_action: action: fire-dom-event xiaomi_vacuum_map_card: action_handler_id: xiaomi_vacuum_map_card_id_1 action: repeats.set data: value: 2Clears current selection
tap_action: action: fire-dom-event xiaomi_vacuum_map_card: action_handler_id: xiaomi_vacuum_map_card_id_1 action: selection.clear
FAQ
Make sure to check out FAQ section in Discussions, it contains a lot of useful information
Does this card require rooted device?
No, it only utilizes features of Home Assistant.
How to create a map?
The easiest way is to use Xiaomi Cloud Map Extractor, but you can use any image (e.g., a screenshot from Mi Home/FloleVac).
Can I use image that has a perspective distortion?
Yes, you just have to provide 4 calibration points.
Migrating from v1.x.x
Configuration with map_image
Old config (v1.x.x) | New config (v2.x.x) |
|---|---|
type: custom:xiaomi-vacuum-map-card
entity: vacuum.xiaomi_vacuum
map_image: '/local/custom_lovelace/xiaomi_vacuum_map_card/map.png'
calibration_points:
- vacuum:
x: 25500
y: 25500
map:
x: 466
y: 1889
- vacuum:
x: 26500
y: 26500
map:
x: 730
y: 1625
- vacuum:
x: 25500
y: 26500
map:
x: 466
y: 1625
zones:
- [[25500, 25500, 26500, 26500]]
- [[24245, 25190, 27495, 27940], [27492, 26789, 28942, 27889]]
|
type: custom:xiaomi-vacuum-map-card
entity: vacuum.xiaomi_vacuum
map_source:
image: '/local/custom_lovelace/xiaomi_vacuum_map_card/map.png'
calibration_source:
calibration_points:
- vacuum:
x: 25500
y: 25500
map:
x: 466
y: 1889
- vacuum:
x: 26500
y: 26500
map:
x: 730
y: 1625
- vacuum:
x: 25500
y: 26500
map:
x: 466
y: 1625
map_modes:
- template: vacuum_clean_zone
- template: vacuum_goto
- template: vacuum_clean_zone_predefined
predefined_selections:
- zones: [[25500, 25500, 26500, 26500]]
- zones: [[24245, 25190, 27495, 27940], [27492, 26789, 28942, 27889]]
|
Configuration with map_camera
Old config (v1.x.x) | New config (v2.x.x) |
|---|---|
type: custom:xiaomi-vacuum-map-card entity: vacuum.xiaomi_vacuum map_camera: camera.xiaomi_cloud_map_extractor camera_calibration: true zones: - [[25500, 25500, 26500, 26500]] - [[24245, 25190, 27495, 27940], [27492, 26789, 28942, 27889]] |
type: custom:xiaomi-vacuum-map-card
entity: vacuum.xiaomi_vacuum
map_source:
camera: camera.xiaomi_cloud_map_extractor
calibration_source:
camera: true
map_modes:
- template: vacuum_clean_zone
- template: vacuum_goto
- template: vacuum_clean_zone_predefined
predefined_selections:
- zones: [[25500, 25500, 26500, 26500]]
- zones: [[24245, 25190, 27495, 27940], [27492, 26789, 28942, 27889]]
|
Translations
Currently, this card contains translations for following languages:
bg- Bulgarian (Български)ca- Catalan (Català)cs- Czech (Čeština)da- Danish (Dansk)de- German (Deutsch)el- Greek (Ελληνικά)en- Englishes- Spanish (Español)fi- Finnish (Suomi)fr- French (Français)he- Hebrew (עברית)hu- Hungarian (Magyar)is- Icelandic (Íslenska)it- Italian (Italiano)lv- Latvian (Latviešu)nb-NO- Norwegian Bokmål (Norsk bokmål)nl- Dutch (Nederlands)pl- Polish (Polski)pt- Portuguese (Português)pt-BR- Brazilian Portuguese (Português Brasileiro)ro- Romanian (Română)ru- Russian (Русский)sk- Slovak (Slovenčina)sv- Swedish (Svenska)tr- Turkish (Türkçe)uk- Ukrainian (Українська)zh- Chinese (中文)zh-Hant- Traditional Chinese (正體中文)
Special thanks
I'd like to give special thanks to people who helped me with card's design and development:
Support
If you want to support my work with a donation you can use one of the following platforms:
| Platform | Payment methods | Link | Comment |
|---|---|---|---|
| Ko-fi |
|

|
|
| buycoffee.to |
|

|
|
| PayPal |
|
|
|
| Revolut |
|

|
|
Powered by
