Application layer > lidarslam_ros2
ROS2 package of 3D lidar slam using ndt/gicp registration and pose-optimization.
lidarslam_ros2
ROS 2 LiDAR SLAM focused on non-GPL pointcloud-map authoring, benchmarking, and compatibility with Autoware pointcloud-map workflows.
Status:
developtracks the currentv2 alphaline. For the latest tagged public beta, see v0.2.2 Release Notes.
Recommended Public Workflow
The recommended public path in this repository is:
- frontend:
RKO-LIO - backend:
graph_based_slam - output: Autoware-compatible
pointcloud_map/andmap_projector_info.yaml
This is the path exercised in the public quickstart, benchmark flow, and release/readiness gate.
Scope
This repository is for people who want:
- ROS 2 LiDAR SLAM with loop closure
- pointcloud maps that Autoware can load
- lanelet2 maps auto-generated from SLAM trajectories
- end-to-end autonomous driving on self-made maps (AWSIM + Autoware)
- a non-GPL default workflow
Out of scope for the public path:
- Autoware planning/localization bringup beyond the provided demo scripts
- GPL-only frontend or backend components in the default workflow
Why This Repo
- non-GPL default path:
graph_based_slam,scanmatcher,RKO-LIO,DLIO, and optionalFAST_GICP - pointcloud-map authoring is treated as a first-class workflow, not just a side-effect of odometry
- Autoware pointcloud-map flow is exercised end-to-end
- AWSIM → lidarslam → Autoware autonomous driving pipeline with one-command demo
- lanelet2 auto-generation from SLAM trajectories (multi-segment with shared boundary nodes)
- default benchmark path is tracked on
NTU VIRAL - current long-loop evidence is tracked on
MID360 - optional GNSS georeferencing writes
map_projector_info.yaml; GNSS edges can use covariance-based weighting - GPL-free Scan Context place recognition is available in
graph_based_slam - optional MIT-licensed 3D-BBS loop-candidate verification can be built from the vendored
Thirdparty/3d_bbssource and remains disabled at runtime by default - report helpers cover benchmarks, GNSS, cleanup, dynamic filtering, place recognition, and submission bundles
Install
Clone with submodules and install dependencies:
cd ~/ros2_ws/src
git clone --recursive https://github.com/rsasaki0109/lidarslam_ros2.git
cd ..
rosdep install --from-paths src --ignore-src -r -y
If you already cloned without submodules:
git -C src/lidarslam_ros2 submodule update --init --recursive
Build the workspace:
colcon build --symlink-install --cmake-args -DCMAKE_BUILD_TYPE=Release
Quickstart
# local checks
bash scripts/run_default_ci_checks.sh
# fixed public quickstart
bash scripts/download_ntu_viral_tnp01.sh
bash scripts/run_autoware_quickstart.sh
# arbitrary rosbag2
bash scripts/run_autoware_map_beginner.sh /path/to/rosbag2
AWSIM Autonomous Driving Pipeline
AWSIM simulator data can flow through lidarslam into pointcloud_map, generated lanelet2, and Autoware driving demos. Start with:
bash scripts/test_awsim_setup.sh
bash scripts/run_awsim_selfmade_map_demo.sh
For map packaging, lanelet2 generation, and terminal-by-terminal bringup, see AWSIM Autonomous Driving Tutorial.
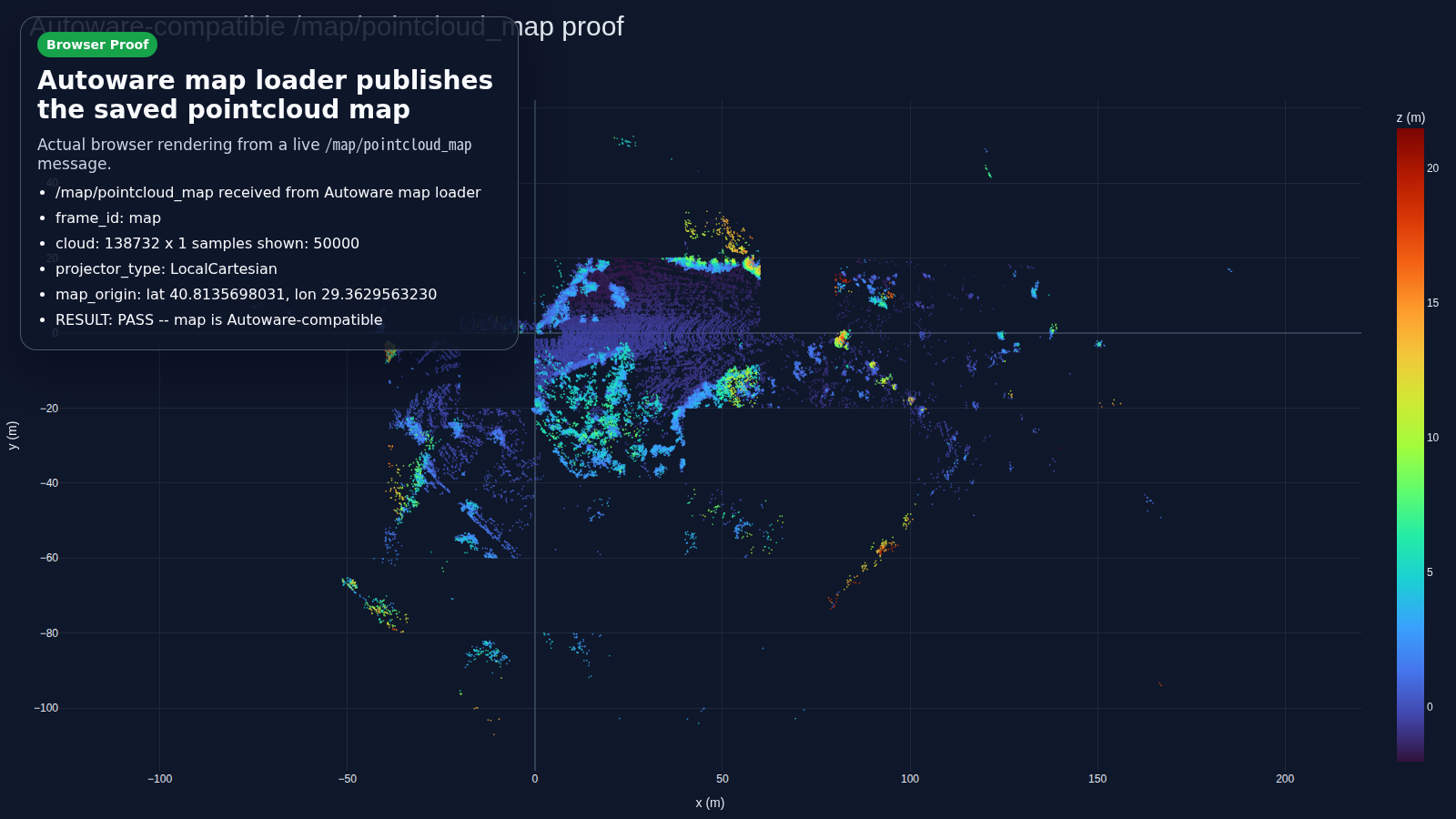
Point-Cloud Map Example
Autoware-compatible browser proof built from a live /map/pointcloud_map: the rendered map comes from Autoware map loaders, map verify is PASS, and GNSS runs emit LocalCartesian.
 Save-time dynamic-object filtering on Leo Drive
Save-time dynamic-object filtering on Leo Drive bag6 cuts saved points by about 50% while keeping verification PASS.

Docs
- AWSIM Autonomous Driving Tutorial
- Autoware-Compatible Map Authoring / Autoware Quickstart / Autoware Foxglove
- Operator Workflows
- Benchmarking And Release Gate
- Comparison
- v0.2.2 Release Notes
- Contributing
- Changelog
- Releasing
Preview the doc site locally with python3 -m mkdocs serve.
Current Snapshot
The current public evidence covers NTU VIRAL, MID360, GNSS map metadata, and dynamic-filter save-time cleanup. More detail lives in docs/comparison.md, docs/benchmarking.md, output/benchmark_summary.md, and output/latest_report.html.
Main Entrypoints
Required input topics for the main public path:
| Launch path | Required topics | Optional topics |
|---|---|---|
ros2 launch lidarslam rko_lio_slam.launch.py |
LiDAR sensor_msgs/PointCloud2 on lidar_topic, IMU sensor_msgs/Imu on imu_topic |
sensor_msgs/NavSatFix on gnss_topic (default: /gnss/fix) when use_gnss:=true |
ros2 launch lidarslam lidarslam.launch.py |
Point cloud sensor_msgs/PointCloud2 on input_cloud, TF from robot_frame_id to the LiDAR frame |
IMU on imu_topic when scanmatcher use_imu:=true, odom TF when scanmatcher use_odom:=true, GNSS on gnss_topic (default: /gnss/fix) when backend use_gnss:=true |
ros2 launch graph_based_slam graphbasedslam.launch.py |
lidarslam_msgs/MapArray on map_array |
IMU on /imu when use_imu_preintegration:=true, GNSS on gnss_topic (default: /gnss/fix) when use_gnss:=true |
There is no wheel-speed / vehicle-speed input in the current public path yet.
The backend GNSS subscription topic is configurable with gnss_topic (default: /gnss/fix). Inspect covariance with scripts/inspect_navsatfix_covariance.py; Applanix conversion details live in docs/workflows.md.
Run the public Autoware quickstart:
bash scripts/run_autoware_quickstart.sh
Run RKO-LIO + graph_based_slam directly:
ros2 launch lidarslam rko_lio_slam.launch.py \
bag_path:=/path/to/rosbag2 \
lidar_topic:=/os_cloud_node/points \
imu_topic:=/os_cloud_node/imu
Save the current map:
ros2 service call /map_save std_srvs/srv/Empty
To filter likely dynamic objects only in the saved map output, enable use_dynamic_object_filter: true and tune dynamic_object_filter_voxel_size, dynamic_object_filter_min_observations, dynamic_object_filter_temporal_window, and dynamic_object_filter_max_range_from_sensor_m before calling /map_save.
Run the standard benchmark path:
bash scripts/download_ntu_viral_tnp01.sh
bash scripts/run_rko_lio_graph_benchmark.sh
For KITTI Odometry / Velodyne-only evaluation, Leo Drive classic-path suites, dynamic-filter benchmarks, and MID360 place-recognition comparisons, use the entrypoints documented in docs/benchmarking.md.
Run the local readiness gate:
bash scripts/run_release_readiness_checks.sh --ape-threshold 0.10
License Policy
The default public workflow excludes GPL-only frontend/backend components. graph_based_slam is BSD-2-Clause; RKO-LIO, DLIO, and optional vendored 3D-BBS are MIT; FAST_GICP is BSD-3-Clause; built-in Scan Context is implemented locally. Thirdparty/lio-sam and Thirdparty/3d_bbs are excluded from direct colcon package discovery via COLCON_IGNORE.
Support Matrix
| ROS 2 distro | Ubuntu | Scope |
|---|---|---|
| Humble | 22.04 | default workflow build and package tests in CI |
| Jazzy | 24.04 | default workflow build and package tests in CI; Autoware pointcloud-map dogfood exercised locally |
Quality Gates
The main checks for the public path are bash scripts/run_default_ci_checks.sh, python3 scripts/verify_autoware_map.py <pointcloud_map_dir>, bash scripts/run_autoware_quickstart.sh, bash scripts/run_rko_lio_graph_autoware_dogfood.sh --auto-exit-secs 20, and bash scripts/run_release_readiness_checks.sh --ape-threshold 0.10.
For the command-level details, parameter-file pointers, and Autoware map output notes, see docs/workflows.md.